| |

O que caracteriza o movimento em geral é a variação
do vetor
de posição. Dizemos assim que houve movimento se o vetor
de posição r passou para outro vetor de posição
r', isto é,


Nós dizemos que o movimento é de rotação
pura se a direção e o sentido do vetor posição
mudam, ou seja, se apenas o módulo do vetor permanece constante.
Portanto, numa rotação pura,

necessário
que dessa força (ou forças) resulte um torque aplicado
num ponto do mesmo. O torque de uma força é uma grandeza
vetorial. Sendo O o ponto em torno do qual se dá a rotação,
chamemos de  vetor de posição, com origem em O e que indica o ponto
de aplicação da força
vetor de posição, com origem em O e que indica o ponto
de aplicação da força
 .
O módulo do torque é dado pelo produto do módulo
da força pelo módulo do vetor de posição
e pelo seno do ângulo formado entre os vetores posição
e força
. .
O módulo do torque é dado pelo produto do módulo
da força pelo módulo do vetor de posição
e pelo seno do ângulo formado entre os vetores posição
e força
.

 |
 entrando na folha de papel, perpendicularmente.
entrando na folha de papel, perpendicularmente.
Direção: perpendicular à folha
Sentido: entrando no papel, no eixo de rotação

Rotação será no sentido horário. |
|
 |
saindo da folha de papel, perpendicularmente.
Direção: perpendicular à folha
Sentido: saindo do papel
Módulo = F.r.senq
Rotação será no sentido anti-horário.
|
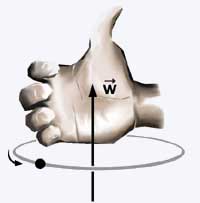
Use
a regra da mão direita para definir a direção
e o sentido do vetor torque.
Posicione os dedos da mão direita na direção
indicada pela força. O polegar esticado indicará a direção
procurada.
Quanto
maior for o torque maior será a facilidade para abrir uma porta.
Por isso, é tão difícil abrir uma porta empurrando-a
nos pontos próximos às suas dobradiças (como
a distância é pequena, o torque é pequeno).
A rotação provocada por um torque pode ter dois sentidos:
o sentido do ponteiro dos relógios e o sentido oposto (isto
é, podemos abrir ou fechar uma porta aplicando torques em sentidos
opostos).
Quando aplicamos dois torques iguais num corpo, mas com sentidos opostos,
existe equilíbrio. O corpo não entra em rotação.
Assim sendo, rotações decorrem de torques aplicados
ao corpo. Uma vez colocado em rotação, um corpo permanecerá
sempre em rotação, a menos que lhe apliquemos torques.

Marques
e Ueta
|
|